Einsatz der computerassistierten Chirurgie in der MKG-Chirurgie


Die intraoperative Navigation als Anwendungsvariante der CAS, die sich aus präoperativer Planung, intraoperativer Navigation und postoperativer Kontrolle zusammensetzt, kann mit den Navigationssystemen von Fahrzeugen verglichen werden, bei denen Satellitenempfänger die vom Fahrzeug ausgestrahlten GPS-Signale lokalisieren und so die Position des Fahrzeugs bestimmen. Im Fall der intraoperativen Navigation erfolgt die Positionsbestimmung durch ein System zur Erfassung des Patienten sowie der verwendeten Instrumente. Die Landkarten entsprechen dabei den vom Patienten vor der Operation angefertigten Datensätzen der Computer-, der Kernspin- und der digitalen Volumentomografie sowie den Informationen der präoperativen Eingriffsplanung.
Die Geschichte der CAS
Der Ursprung der CAS kann in die Anfänge des 20. Jahrhunderts zurückverfolgt werden, als in der Neurochirurgie ein stereotaktischer Apparat entwickelt wurde, der es ermöglichte, zuvor geplante Zugangswege zum Gehirn zu erreichen, die auf den Bilddaten des Patienten markiert wurden [Clarke Horsley, 2007]. Durch die Einführung der Computer- und der Magnetresonanztomografie in den 70er-Jahren verbesserten sich die Möglichkeiten der Navigation durch die bessere Darstellung der anatomischen Strukturen. Mit der Einführung der rahmenlosen Stereotaxie, die als Ursprung der modernen computerassistierten Chirurgie gilt, wurden Ende der 80er-Jahre mechanische [Dreiseidler et al., 2011; Uribe, Rojas Rosas, 2013], akustische [Roberts et al., 1986], elektromagnetische [Roberts et al., 1986] und optische [Heilbrun et al., 1992; Schlondorff, 1998] Systeme entwickelt, durch die eine rahmenlose Lokalisation der Instrumente möglich sein sollte. 1993 wurde einer der ersten Neuronavigatoren präsentiert, bei dem anhand präoperativer bildgebender Verfahren anatomische Punkte durch einen Sensor abgetastet werden konnten [Watanabe et al., 1993].
Entwicklungen in diesem Bereich führten zu Systemen, die Sensoren verwenden, die sowohl am Instrument als auch am Patienten befestigt werden, so dass die Lage der Instrumente direkt über diese Sensoren erfasst werden kann [Kato et al., 1991]. Diese Entwicklung führte gleichzeitig zu einer Etablierung der CAS, so dass diese in vielen chirurgischen Disziplinen routinemäßig eingesetzt werden konnte. Klassische Einsatzgebiete in der Medizin sind die Neurochirurgie, die Hals-, Nasen- und Ohrenheilkunde sowie die Orthopädie und die Unfallchirurgie. Ein inzwischen sehr breites Anwendungsfeld der CAS stellt die Mund-, Kiefer und Gesichtschirurgie (MKG) dar, da die Eingriffe durch den Einsatz der CAS weniger invasiv und präziser sind.
Anwendungsgebiete der CAS
Biopsien:
Navigationsgestützte Biopsien stellten das erste Anwendungsfeld der CAS im Kopf-/Halsbereich dar [Watanabe et al., 1991]. Die minimal-invasiven Eingriffe zeichnen sich dadurch aus, dass sie den am geringsten traumatisierenden Zugangsweg wählen und so die Mortalität bei gleichzeitiger Schonung benachbarter Strukturen verringern. Im Bereich der MKG sind diese beispielsweise bei Biopsien im retromaxillären oder im intraorbitalen Bereich indiziert sowie für die Entfernung kleiner gut- oder bösartiger Prozesse. Bei Biopsien im retromaxillären oder im intraorbitalen Bereich besteht der Vorteil der CAS darin, dass der retromaxilläre Raum durch die intraoperative Navigation – anstatt von präaurikulär oder retromandibulär – von intra-oral aufgesucht werden kann, wodurch die Morbidität der Eingriffe verringert wird. Auch bei posttraumatischen Revisionen im Bereich der Nasennebenhöhlen eignet sich die CAS besonders gut, da die Lokalisation der Endoskope intraoperativ navigiert werden kann und so Fehlpositionierungen und Verletzungen vitaler Strukturen vermieden werden können [Gellrich Schmelzeisen, 2006; Gellrich et al., 2002]. Die häufigste Indikation der CAS in diesem Bereich stellen Probebiopsien im Vorfeld einer Operation dar, bei denen der Zugangsweg mithilfe der CAPP geplant wird.
Traumatologie:
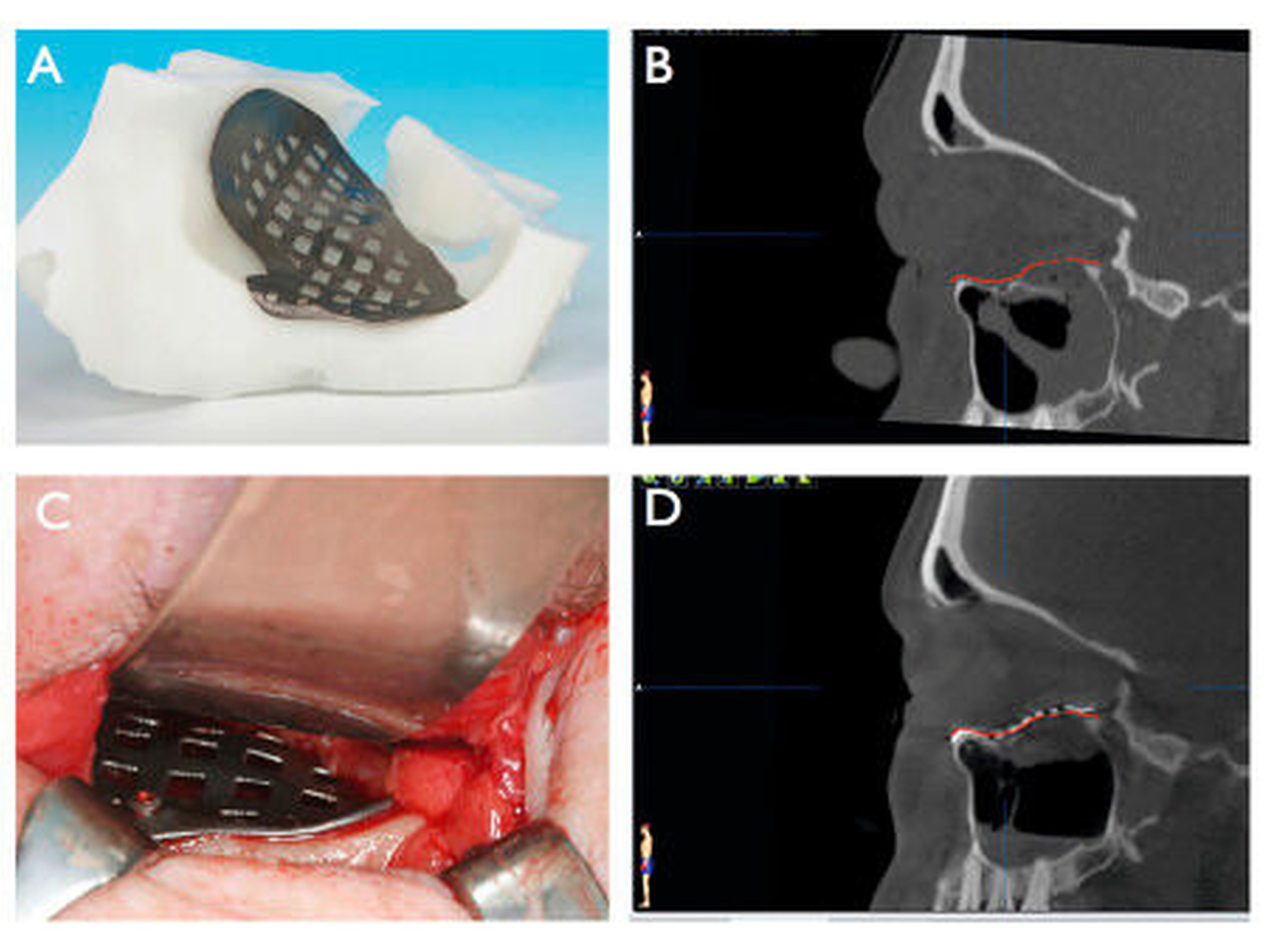
Hinsichtlich der ästhetischen und der funktionellen Rekonstruktion von Gesichtsschädelfrakturen hat sich die CAS als sehr hilfreich erwiesen, da durch die detaillierte Planung mithilfe der bildgebenden Verfahren das Rekonstruktionsergebnis genau vorhergesagt werden kann. Die intraoperative Navigation erlaubt zudem eine stetige Kontrolle der Rekonstruktionsschritte, so dass Fehlpositionierungen verhindert werden können und somit die Notwendigkeit einer späteren Korrektur des Operationsergebnisses im Rahmen eines Folgeeingriffs minimiert wird. Die originalgetreue Rekonstruktion des Gesichts durch eine virtuelle Planung wird bei unilateralen Frakturen durch eine Spiegelung der unbetroffenen Seite erreicht, so dass im Vorfeld der Operation patientenspezifische Implantate hergestellt werden können. Abbildung 1 fasst die Arbeitsabläufe der CAS in der Traumatologie zusammen.
Bei sekundären Rekonstruktionen, die sich aufgrund der Weichteilatrophien und der Vernarbungen schwieriger gestalten, wird der gleiche Ansatz gewählt, wobei in der präoperativen Planung zusätzlich die dislozierten Knochen betrachtet und ideale Linien für die Osteotomie geplant werden.
Schwieriger gestaltet sich die Rekonstruktion von bilateralen und mittellinienüberschreitenden Traumata wie komplexen Mittelgesichtsfrakturen oder panfazialen Frakturen, da hier keine Referenz für die Planung des Rekonstruktionsergebnisses im Sinne unbetroffener Strukturen vorliegt. Aber auch für diesen Bereich wurden inzwischen Algorithmen entwickelt, die ein auf Normschädeln basierendes Modell der rigiden und der elastischen Deformation verwenden, um eine virtuelle Rekonstruktion zu ermöglichen. Ebenfalls eine Herausforderung stellen Orbitawand- und Orbitabodendefekte aufgrund der eingeschränkten Sicht bei der Auswahl des Zugangsweges dar. In diesem Bereich kommt es daher häufig zu Fehlpositionierungen der Implantate, die wiederum zu vermeidbaren Sekundärrekonstruktionen führen. Hier hat die intraoperative Navigation den Vorteil, dass die Positionierung der Implantate genau überwacht und mit dem präoperativ fest-gelegten Zielzustand abgeglichen werden kann [Schramm Wilde, 2011].
Orthognathe Chirurgie:
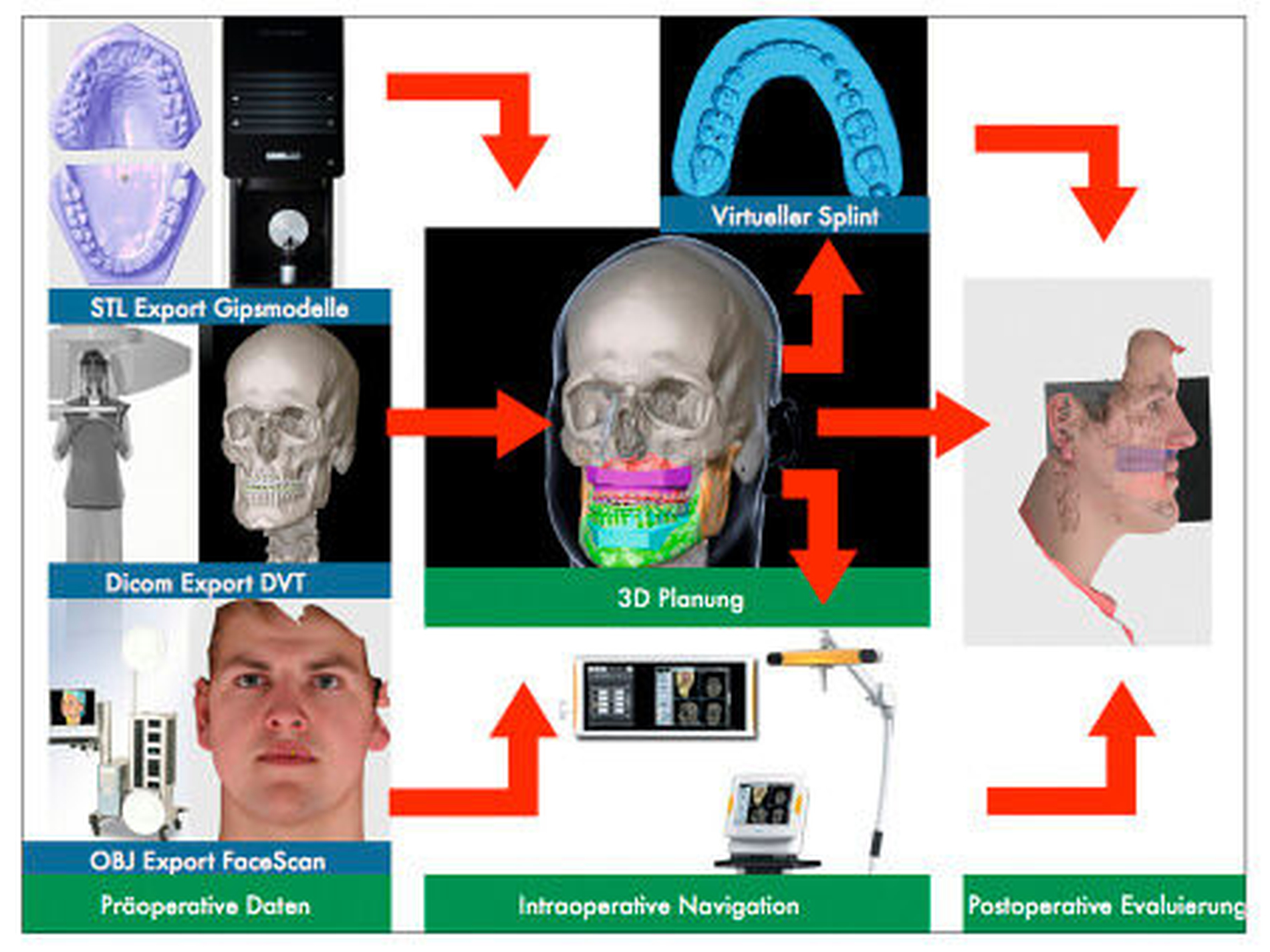
In der orthognatischen Chirurgie erlangt die CAS eine immer größere Bedeutung [Xia et al., 2011; Zizelmann et al., 2012]. In der Behandlung steht neben der funktionellen Verbesserung der mit der Kieferfehlstellung einhergehenden Störungen auch die Ästhetik im Vordergrund. Eine Umstellungsosteotomie kann mithilfe der CAS detailliert geplant und die Verschiebungen der Kieferposition können virtuell simuliert werden, bis eine zufriedenstellende vorliegt. Nach Erstellung der dreidimensionalen Bilddaten mittels CT oder DVT wird beispielsweise ein Autosegmentierungs-Algorithmus eingesetzt, um die virtuelle Le-Fort-I-Osteotomie des Oberkiefers und die bisagittale Spaltosteotomie nach Obwegeser vorzubereiten. Anschließend werden Gipsmodelle des Zahnbogens vom Ober- und vom Unterkiefer des Patienten durch einen dreidimensionalen dentalen Oberflächenscanner gescannt und in die initialen CT- oder DVT-Datensätze importiert, so dass die bildliche Darstellung der Zähne verbessert wird. Dieser Schritt ist entscheidend für die Okklusionskontrolle und das Erstellen der interdentalen Splints. Zu Beginn der virtuellen Planung wird die gewünschte Position des Oberkiefers festgelegt und die Kollisionskontrolle genutzt, um eine angemessene dentale Okklusion des Ober- und Unterkiefers zu berechnen. Schließlich wird eine boolesche Verknüpfung durchgeführt, um aus dem vorläufigen virtuellen Splint einen tatsächlichen Splint zu erstellen. Dieser wird dann mithilfe eines 3-D-Druckers hergestellt. Die Arbeitsabläufe der CAS in der orthognathen Chirurgie werden in Abbildung 2 dargestellt.
Dentale Implantologie:
Die Ziele der CAS in der dentalen Implantologie liegen in der prothetisch orientierten Rehabilitation der Kaufunktion sowie in der Schonung vitaler Strukturen mit der Verringerung postoperativer Komplikationen. Darüber hinaus sollen die funktionellen und die ästhetischen Ergebnisse verbessert werden. Durch den Einsatz der CAS kann einer fehlerhaften Implantatpositionierung und der Verletzung kritischer Strukturen entgegengetreten werden [Miller, 2007; Miller Bier, 2006].
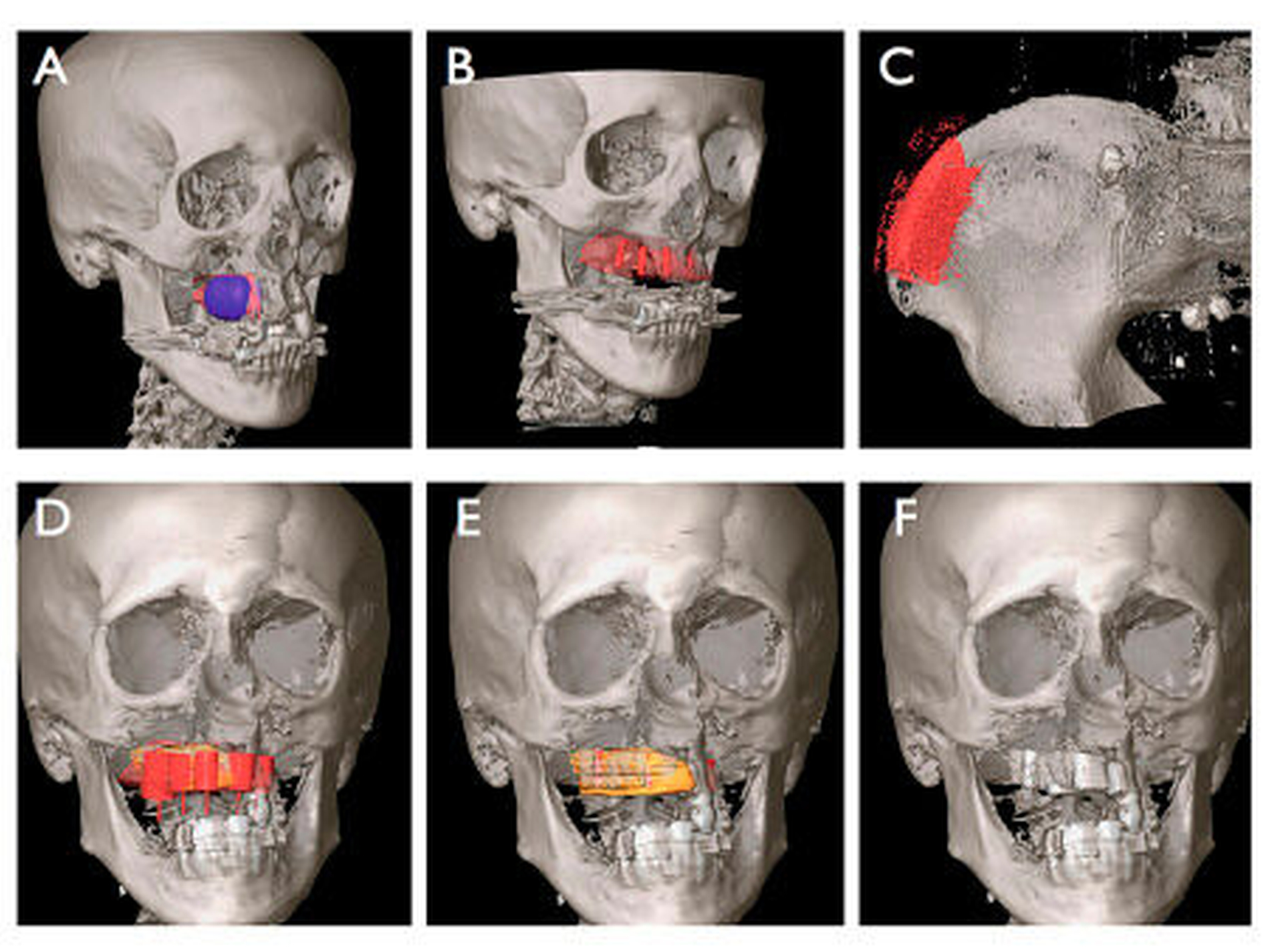
Typische Indikationen sind die Insertion von Zygoma-Implantaten nach ablativer Tumorchirurgie im Oberkiefer und die Implantatinsertion nach ausgedehnten Knochentransplantationen [Hohlweg-Majert et al., 2005]. Für den Erfolg einer implantatprothetischen Rehabilitation ist die exakte präoperative Planung der Implantatposition und der prothetischen Versorgungsmöglichkeiten ausschlaggebend. In diesem Bereich spielt das sogenannte „Backward planning“ eine entscheidende Rolle, da im Verlauf der präoperativen Planung das gewünschte Endergebnis den Ausgangspunkt der Planung darstellt. Ausgehend von diesem Behandlungsziel unterstützt die CAS den Chirurgen durch die erhobenen Bilddaten nicht nur in der Planung, sondern durch den Einsatz dentaler Navigationssysteme auch in der Durchführung und Dokumentation des Eingriffs. Die Arbeitsabläufe der CAS in der dentalen Implantologie werden in Abbildung 3 dargestellt.
Tumorchirurgie:
Im Rahmen der Tumorchirurgie können unter Einsatz der CAS die Resektionsränder inzwischen besser definiert und eine komplette Tumorresektion durchgeführt werden [Schramm et al., 1999]. In der ablativen Chirurgie werden im Zuge der präoperativen Planung zunächst die multimodalen Bildsätze fusioniert, um die knöcherne Beteiligung sowie die Tumorausdehnung zu erfassen. Mithilfe der Segmentierung werden die Resektionsgrenzen mit dem erforderlichen Sicherheitsabstand festgelegt. Darüber hinaus wird in dieser Phase die virtuelle Rekonstruktion geplant. Diese ist nicht nur notwendig, um die patientenspezifischen Implantate herzustellen, sondern spielt auch während der intra-operativen Navigation eine wichtige Rolle. Durch zuvor segmentierte anatomische Strukturen, wie beispielsweise der A. carotis interna oder der Sehnerven, wird die Navigation erleichtert. Gleichzeitig hat der Operateur die Möglichkeit, intraoperative Informationen zu markieren und zu speichern. Diese Informationen sind vor allem für den Strahlentherapeuten von Bedeutung, so dass dieser die markierten, intraoperativ aus anatomischen Gründen nicht resektablen Tumoranteile oder den nicht einhaltbaren Sicherheitsabstand in seiner Bestrahlungsplanung berücksichtigen kann. Ohne die intraoperative Navigation ist die Benennung und Zuordnung der Randschnitte (Tumor Mapping) erschwert, wodurch die entnommene Probe unter Umständen nicht mehr anatomisch korrekt lokalisiert werden kann. Hier bietet die CAS den Vorteil, dass die Randschnitte virtuell markiert und benannt werden können. Dadurch wird auch die Zuordnung der histologischen Ergebnisse deutlich vereinfacht. Sollte im Langzeitverlauf ein Re-Staging notwendig sein, können die vormals gespeicherten Daten verwendet und mit den neu erhobenen Datensätzen fusioniert und verglichen werden.
Unterkieferrekonstruktionen:
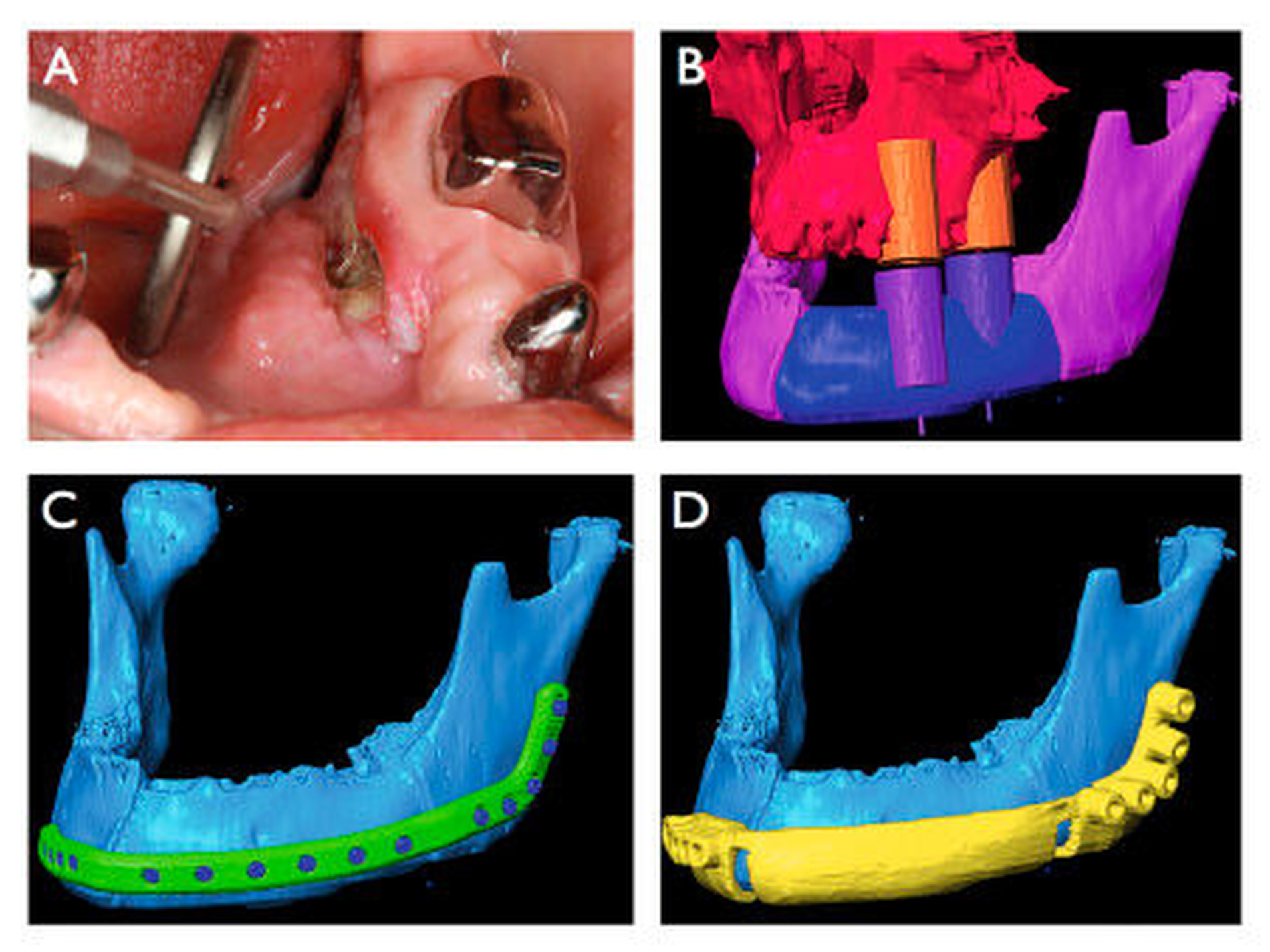
Bei der alloplastischen Rekonstruktion von Resektionsdefekten des Unterkiefers können Hohlzylinder, die die spätere Implantatposition simulieren sollen, in der präoperativen Planung eingesetzt werden. So kann in Abhängigkeit der Implantatposition das später zu transplantierende Knochentransplantat simuliert werden. Anschließend wird das Rekonstruktionsergebnis als virtuelles Modell entworfen und als sterilisierbares CAD- Modell aus Polyamid hergestellt. Passgenau zum Planresultat wird schließlich aus einem einzigen Stück Titan eine patienten spezifische Mandibula-Platte (PSMP) gefräst.
Erste Ansätze mit der CAS ermöglichten nicht nur die Herstellung der STL-Modelle, sondern auch der Bohr- und Resektionsschablonen. Mithilfe dieser Schablonen mit integrierten Bohrhilfen kann die präoperative Planung intraoperativ umgesetzt werden. So kann die Rekonstruktionsplatte ohne zeitaufwendige intraoperative Anpassung kontrolliert eingesetzt und angebracht werden. Die Arbeitsabläufe der CAS in der Unterkieferrekonstruktion werden in Abbildung 4 dargestellt. Durch den Einsatz der CAPP kann somit eine sorgfältige Planung unter Berücksichtigung aller relevanten Informationen den intraoperativen Eingriff erheblich erleichtern und das Ergebnis durch die gewonnene Präzision verbessern. Ein großer Vorteil liegt auch in der Möglichkeit der Herstellung patientenspezifischer Implantate, da aufgrund dieser nicht nur der Funktions- und Organerhalt gesichert werden kann, sondern auch ästhetisch bessere Resultate erzielt werden können.
Dr. Dr. Majeed Rana
Prof. Dr. Dr. Horst Kokemüller
Prof. Dr. Dr. Nils-Claudius Gellrich
Klinik und Poliklinik für Mund-, Kiefer- und Gesichtschirurgie, Medizinische Hochschule Hannover
Carl-Neuberg-Str. 1
30625 Hannover

