Navigationsgestützte Fremdkörperentfernung aus der Kieferhöhle
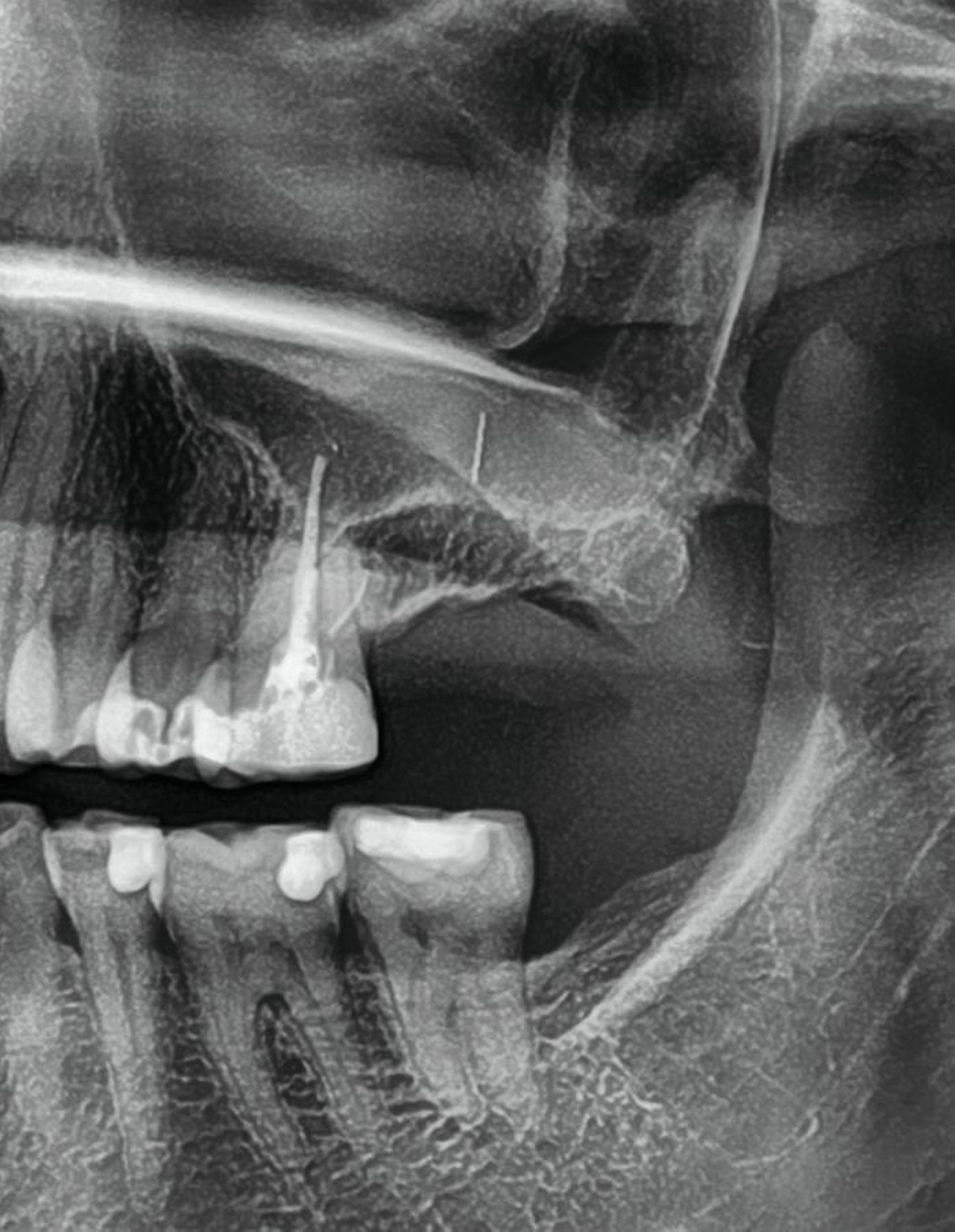

Eine Patientin stellte sich in unserer Praxis mit der Anamnese einer rezidivierenden Sinusitis der linken Kieferhöhle vor. Zum Zeitpunkt der Vorstellung war sie seit mehreren Monaten beschwerdefrei. Eine vom vorbehandelnden Zahnarzt angefertigte Orthopantomografie (OPG) zeigte jedoch einen deutlich erkennbaren Fremdkörper in der linken Kieferhöhle (Abbildung 1). Die Frau berichtete, dass die Sinusitisbeschwerden nach dem Auftreten eines Vorfalls mit einem zahnärztlichen Instrument begonnen hatten.
Nach ausführlicher Anamnese und Rücksprache mit der Vorbehandlerin stellte sich heraus, dass es sich bei dem Fremdkörper um ein frakturiertes Wurzelkanalinstrument handelte, das im Rahmen einer endodontischen Behandlung disloziert und durch den Apex in die Kieferhöhle gedrückt worden war. Die Patientin war gut informiert und wünschte die Entfernung des Fremdkörpers.
Zur Minimierung des operativen Traumas wurde entschieden, ein dynamisches Navigationssystem (X-Guide®, X-Nav Technologies®, Vertrieb: Nobel Biocare®) einzusetzen. Das System war ursprünglich für die navigierte Implantologie konzipiert worden; die Anwendung zur Fremdkörperentfernung stellt somit einen sogenannten Off-Label-Use dar – worüber die Patientin explizit informiert wurde.
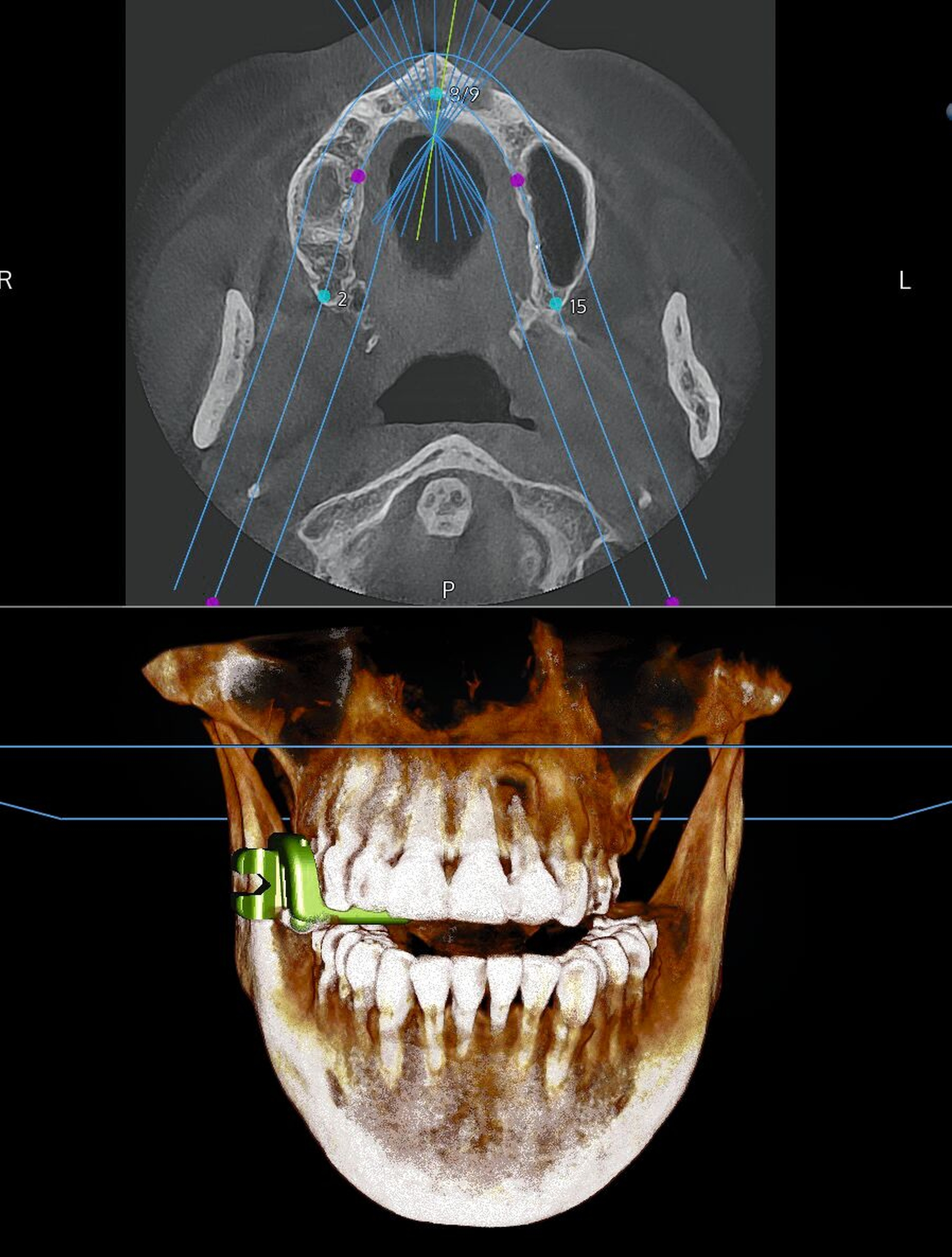
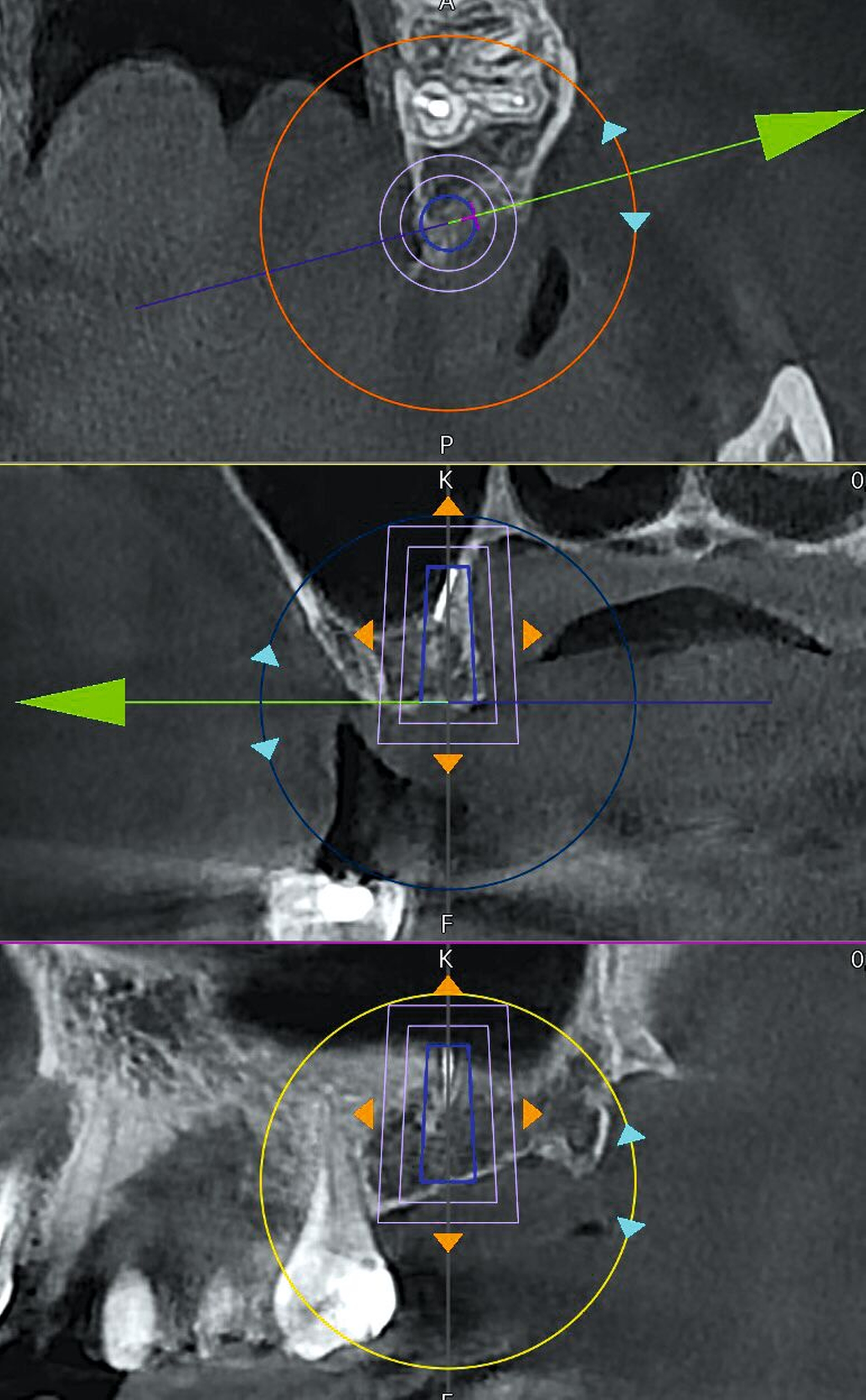
Die dreidimensionale präoperative Planung zeigte, dass das Wurzelkanalinstrument in der palatinalen Wand der linken Kieferhöhle eingebettet war (Abbildung 2a). Um intraoperativ die Mess- und Distanzfunktionen des Navigationssystems optimal nutzen zu können, wurde ein „Simulationsimplantat“ virtuell so geplant, dass der Fremdkörper zentral beziehungsweise apikal im Verlauf des geplanten Implantatkörpers lag (Abbildung 2b).
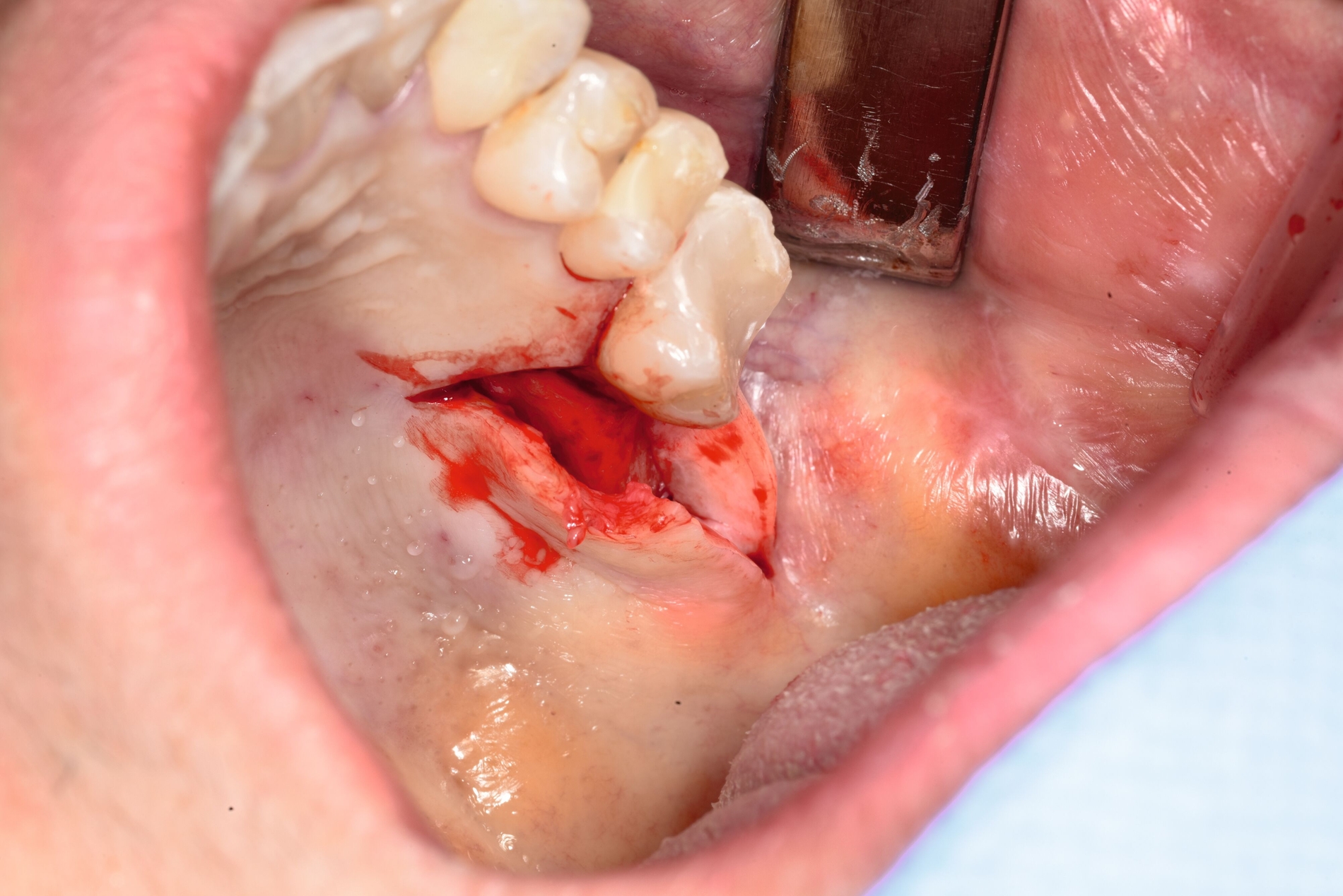
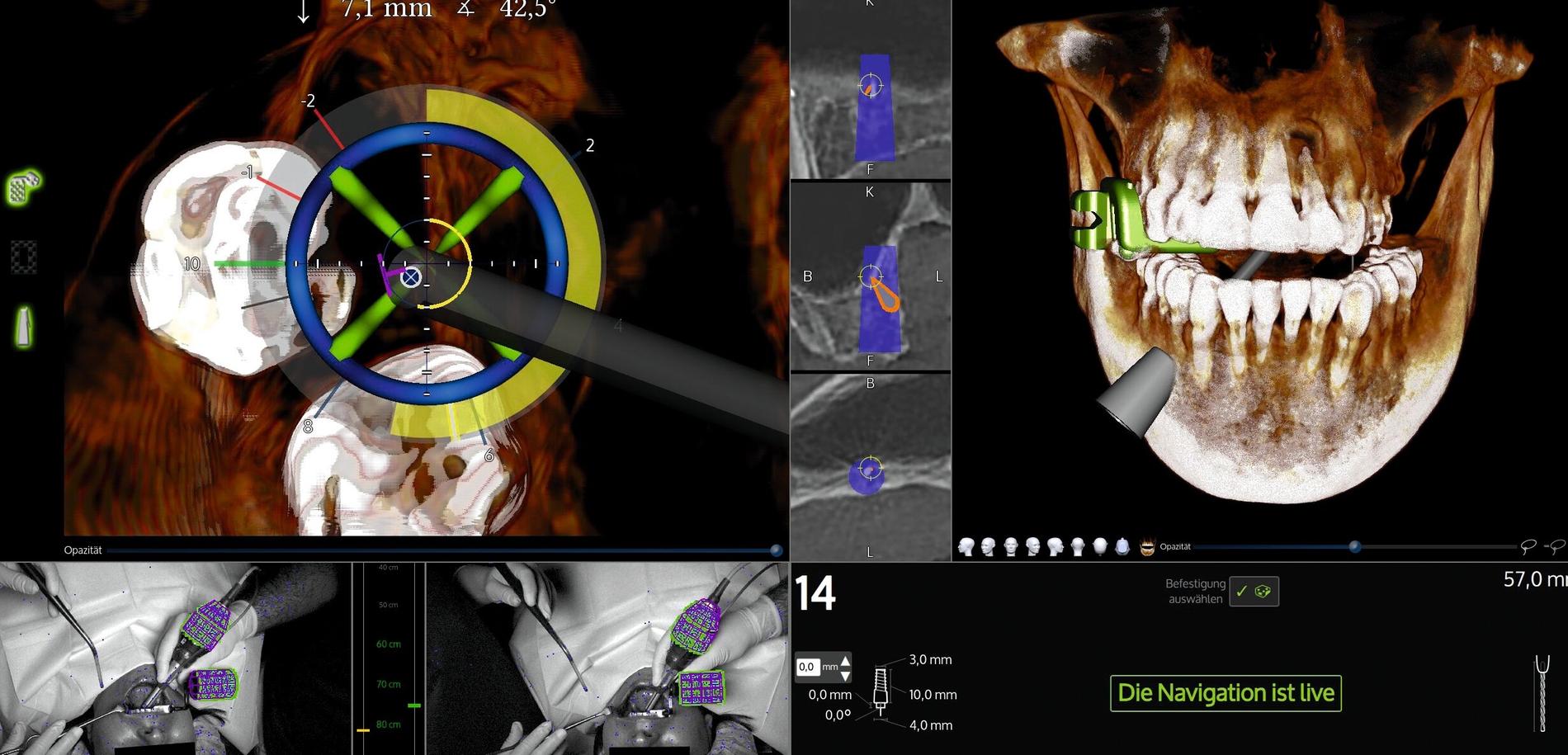
Der Zugangsweg wurde palatinal gewählt. Nach systemgerechter Kalibrierung erfolgte zunächst eine navigationsgestützte Orientierung, da sich der klinische Situs intraoral komplett reizlos und ohne sichtbare Lagehinweise präsentierte (Abbildung 3). Eine Markierung mit dem Rosenbohrer auf der Schleimhaut diente der exakten Referenz für die Lappenschnittführung (Abbildung 4). Präoperativ wurde zudem eine Verbandsplatte für den Gaumen angefertigt, um die postoperative Stabilisierung zu erleichtern.



Die Schnittführung erfolgte krestal mit einer palatinalen Entlastung (Abbildung 5). Anschließend wurde der knöcherne Zugang zur Kieferhöhle unter kontinuierlicher Navigation gezielt osteotomiert (Abbildung 6). Das Navigationssystem ermöglichte dabei eine präzise Lokalisation des Fremdkörpers und erhöhte die Sicherheit in Bezug auf die angrenzenden Strukturen. Nach vorsichtiger, schrittweiser Osteotomie unter Navigationskontrolle (Abbildung 7) konnte das frakturierte Wurzelkanalinstrument schließlich sicher dargestellt und entfernt werden (Abbildung 8). Zur Auffüllung des entstandenen Defekts wurde ein mit PRF (Mectron®-Verfahren) getränktes Knochenersatzmaterial (Bio-Oss Collagen®, Geistlich®) eingebracht (Abbildung 9). Der Wundverschluss erfolgte spannungsfrei mittels Seidennaht 3-0 (Abbildung 10).
Eine postoperative Röntgenkontrolle bestätigte die vollständige Entfernung des Fremdkörpers (Abbildung 11). Die Patientin wurde unter antibiotischer Abschirmung und mit abschwellender Medikation postoperativ betreut und entwickelte einen komplikationslosen Heilungsverlauf.






Diskussion
Die intraoperative Suche und Entfernung von Fremdkörpern – insbesondere filigraner Objekte wie frakturierter Wurzelkanalinstrumente – stellt eine erhebliche chirurgische Herausforderung dar. Abhängig von ihrer Lokalisation gestaltet sich das Auffinden häufig schwierig, zudem kann es im Verlauf des Eingriffs zu unvorhersehbaren Dislokationen kommen. Gerade in anatomisch komplexen Strukturen wie der Kieferhöhle sind ohne eindeutige Lagehinweise substanzschonende chirurgische Zugänge kaum möglich.
Ein konventionelles Vorgehen hätte in diesem Fall entweder eine großflächige Entfernung der palatinalen Knochenlamelle oder alternativ einen transantralen Zugang mit endoskopischer Unterstützung erfordert – jeweils unter zusätzlicher radiologischer Lagekontrolle. Beide Optionen wären mit einem deutlich größeren Gewebetrauma, erhöhtem Zeitaufwand und potenziell höheren postoperativen Beschwerden verbunden gewesen.
Navigationsgestützte Systeme gewinnen daher zunehmend an Relevanz – nicht nur in der Implantologie, sondern auch in anderen oralchirurgischen Indikationen. Neben dem hier eingesetzten System (X-Guide®, Nobel Biocare®) stehen weitere dynamische Navigationssysteme wie Falcon® (Straumann®) oder Navident® (ClaroNav/Dentingo®) zur Verfügung. Diese Technologien ermöglichen eine hochpräzise dreidimensionale Orientierung mit kurzen Kalibrierungszeiten und hoher Zuverlässigkeit. Ihr Nutzen zeigt sich nicht nur bei der Implantatbettaufbereitung, sondern auch in der Endodontie (zum Beispiel Lokalisierung obliterierter Kanaleingänge) und in der komplexen Weisheitszahnentfernung. Die Anwendung ist dabei für Behandler und Patient gleichermaßen vorteilhaft – insbesondere im Hinblick auf Planbarkeit, Sicherheit und Gewebeschonung.
Fazit für die Praxis
Navigationsgestützte Verfahren ermöglichen eine hochpräzise, minimalinvasive Fremdkörperentfernung auch in komplexen anatomischen Regionen wie der Kieferhöhle.
Der Einsatz dynamischer Navigation kann das operative Trauma deutlich reduzieren und die postoperative Regeneration fördern.
Durch die virtuelle Planung eines „Simulationsimplantats“ lässt sich die Zielstruktur intraoperativ exakt lokalisieren und sicher erreichen.
Navigationssysteme sind nicht nur in der Implantologie, sondern auch bei chirurgisch-endodontischen Eingriffen oder in der Weisheitszahnentfernung sinnvoll einsetzbar.
Die Anwendung stellt einen Off-Label-Use dar – eine ausführliche Patientenaufklärung und Dokumentation sind zwingend erforderlich.
Obwohl wissenschaftliche Studien zur navigierten Fremdkörperentfernung bislang selten sind, fallen die publizierten Ergebnisse (zum Beispiel Zubizarreta-Macho et al., 2021; Liu et al., 2024; Wang et al., 2024) durchweg positiv aus. Sie betonen insbesondere die präzise Lokalisation der Zielstruktur und die Minimierung des Operationsaufwands. Auch in unserem Praxisalltag hat sich die dynamische Navigation inzwischen in unterschiedlichen chirurgischen Bereichen etabliert.
Abrechnung
Die Abrechnung erfolgt über die digitale Volumentomografie (DVT) sowie analog zur GOZ mit den Ziffern 9005a (navigationsgestützte Planung) und 6090a (navigierte Osteotomie/Fremdkörperentfernung). Private Kostenträger erkennen diese Analogziffern in Einzelfällen an – eine vorherige Kostenklärung wird empfohlen.
Literaturliste
Álvaro Zubizarreta-Macho, César Castillo-Amature, José María Montiel-Company, Jesús Mena-Álvarez: Efficacy of Computer-Aided Static Navigation Technique on the Accuracy of Endodontic Microsurgery. A Systematic Review and Meta-Analysis. J Clin Med. 2021 Jan 15;10(2):313. https://pubmed.ncbi.nlm.nih.gov/33467707/
Si-Min Liu, Li Peng, Yi-Jiao Zhao, Bing Han, Xiao-Yan Wang, Zu-Hua Wang: Accuracy and efficiency of dynamic navigated root-end resection in endodontic surgery: a pilot in vitro study. BMC Oral Health. 2024 May 19;24(1):582. https://pubmed.ncbi.nlm.nih.gov/38764019/
Fushi Wang, Xinjie Cai, Wei Sun, Chen Chen, Liuyan Meng: Application of dynamic navigation technology in oral and maxillofacial surgery. Clin Oral Investig. 2024 Dec 13;29, https://pubmed.ncbi.nlm.nih.gov/39668318/

Dr. med. Dr. med. dent. Markus Tröltzsch
Kieferheilkunde Ansbach Dr. Dr. Tröltzsch
Maximilianstr. 5, 91522 Ansbach
PD Dr. med. Dr. med. dent. Matthias Tröltzsch
Kieferheilkunde Ansbach Dr. Dr. Tröltzsch
Maximilianstr. 5, 91522 Ansbach

