Die statische Bohrschablone bleibt der Goldstandard

Die digitale Implantatplanung anhand von dreidimensionalen Datensätzen hat die Implantologie auf ein neues qualitatives Niveau gehoben. Statische Bohrschablonen gelten seit Jahren als verlässlicher Standard zur Verbesserung der Übertragungsgenauigkeit aus der Planung in den Operationssitus. Ihr positiver Einfluss auf das Implantatüberleben und die periimplantäre Gesundheit wurde in klinischen Untersuchungen dokumentiert.
Dynamische Navigationssysteme versprechen mehr intraoperative Flexibilität, erfordern jedoch ein hohes Maß an Hand-Auge-Koordination. robotergestützte Implantationssysteme wiederum sollen die digitale Planung nahezu vollständig automatisiert in die klinische Realität übertragen. Bisher fehlten jedoch randomisierte klinische Studien, die diese drei Ansätze unter identischen Bedingungen vergleichen – insbesondere im technisch anspruchsvollen Seitenzahnbereich.
Material und Methode
In die Studie wurden 45 Patientinnen und Patienten mit Einzelzahnlücken im Prämolaren- oder Molarenbereich eingeschlossen. Die Implantation erfolgte randomisiert mithilfe
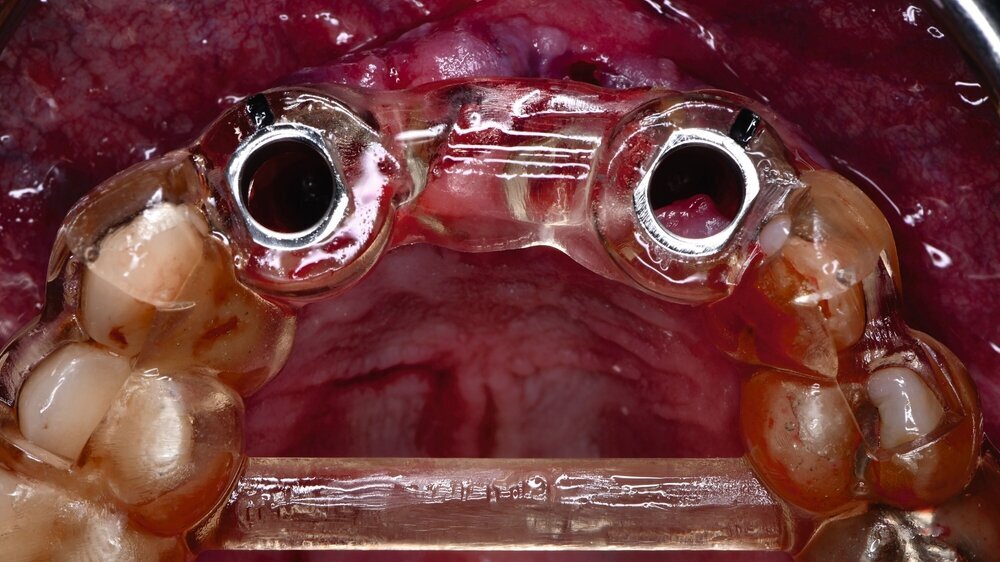
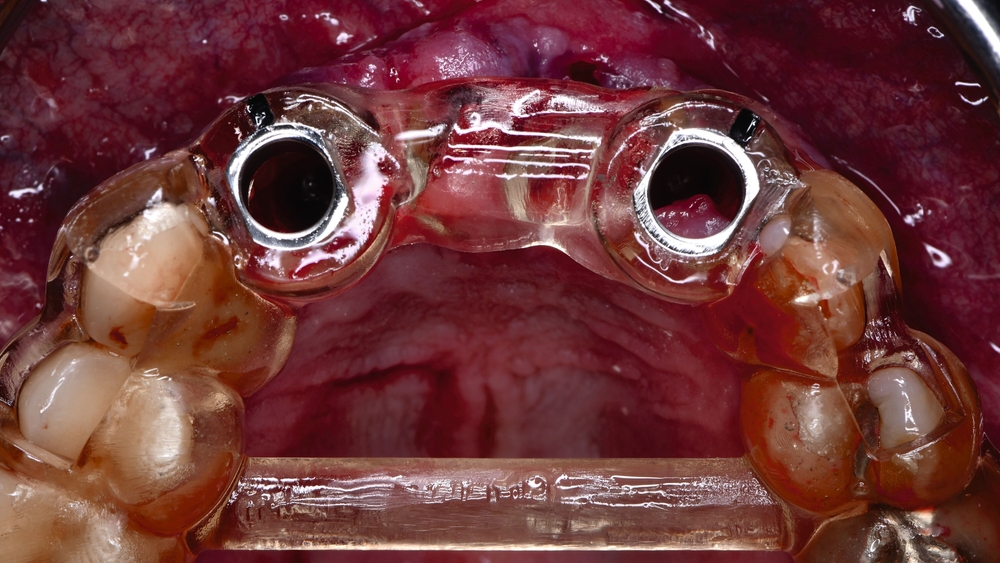
einer 3D-gedruckten statischen Bohrschablone,
dynamischer Navigation oder
eines teilautonomen robotergestützten Systems.
Primärer Endpunkt war die dreidimensionale Abweichung zwischen der geplanten und der tatsächlichen Implantatposition. Zusätzlich erfassten die Autoren die Operationsdauer, frühe Wundheilungsparameter, von Patienten berichtete Ergebnisse sowie die subjektive Einschätzung des Operateurs. Die Implantatposition wurde drei Monate postoperativ anhand digitaler Scans analysiert.

Ergebnisse
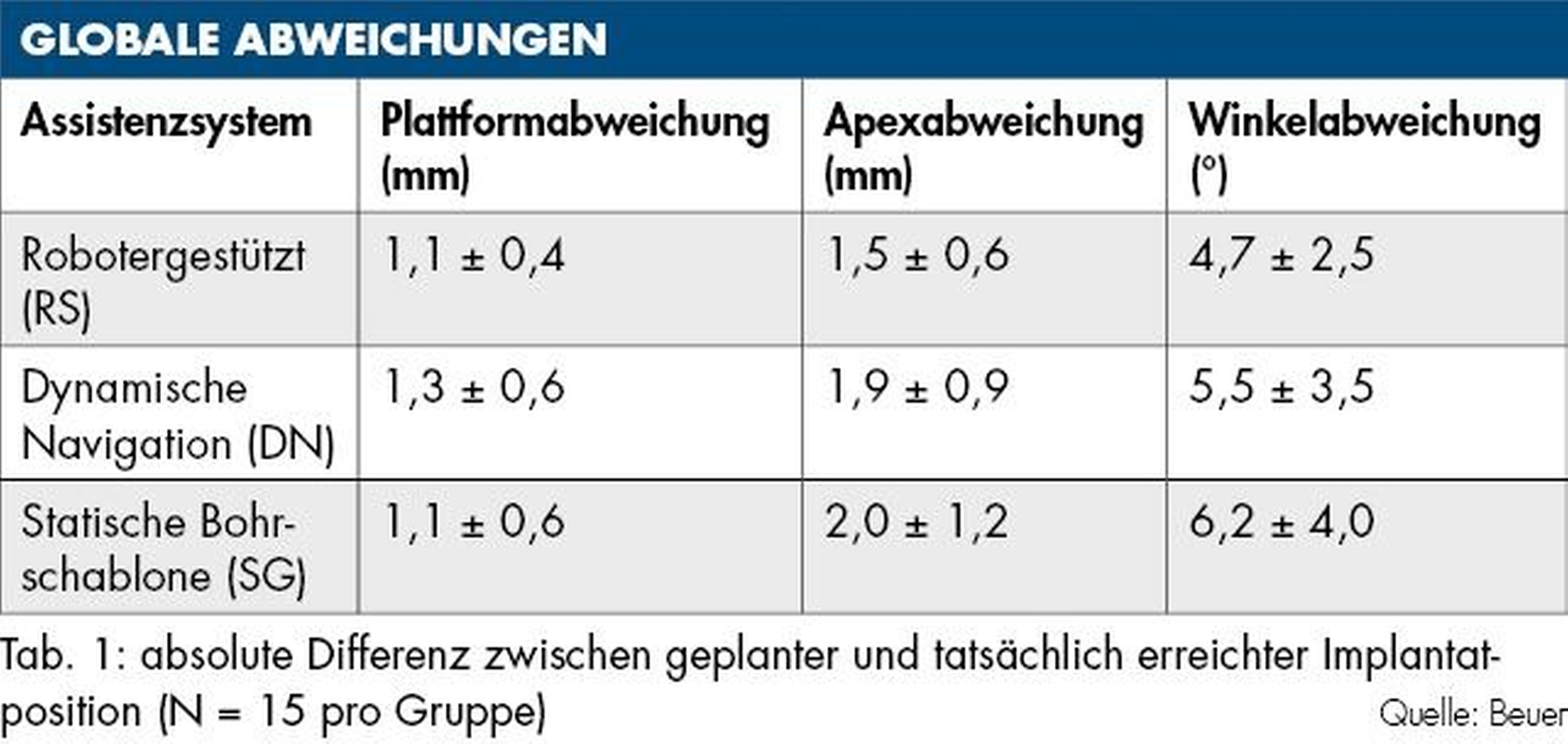
Alle drei Verfahren erreichten klinisch akzeptable Genauigkeiten. Die robotergestützte Implantation zeigte dabei die geringste systematische Abweichung zwischen Planung und tatsächlicher Implantatposition. Während bei der Robotik nahezu kein richtungsabhängiger Fehler festzustellen war, zeigten die dynamische Navigation und die statische Bohrschablone eine leichte, überwiegend nach distal gerichtete Abweichung.
Die absoluten Abweichungen lagen allerdings auch bei der Robotik im Bereich von etwa 1 bis 2 mm sowie rund 5 Grad. Damit fielen sie höher aus als in früheren Fallserien, was die Autoren auf das anspruchsvolle Studiendesign, die Fokussierung auf den Seitenzahnbereich und eine strengere Auswertung zurückführen.
Deutliche Unterschiede zeigten sich bei der Operationsdauer: Die Implantation mit statischer Bohrschablone war signifikant am schnellsten, gefolgt von der dynamischen Navigation. Die robotergestützte Implantation benötigte aufgrund von Kalibrierungs- und Registrierungsprozessen die meiste Zeit.
Hinsichtlich Wundheilung, Weichgewebsdurchblutung und Sauerstoffsättigung ergaben sich keine relevanten Unterschiede zwischen den Gruppen. Patienten der Bohrschablonengruppe berichteten am dritten postoperativen Tag über eine leicht bessere mundgesundheitsbezogene Lebensqualität, während das Schmerzempfinden und die generelle Akzeptanz vergleichbar waren.
Diskussion
Die Ergebnisse bestätigen, dass alle drei computerassistierten Verfahren eine hohe Präzision ermöglichen. Der Vorteil der Robotik liegt in der nahezu systemfehlerfreien Umsetzung der Planung, geht jedoch mit einem deutlich höheren zeitlichen und technischen Aufwand einher. Die dynamische Navigation bietet ergonomische Vorteile und einen besseren Zugang im Seitenzahnbereich, erfordert aber Erfahrung und Schulung. Die statische Bohrschablone überzeugt weiterhin durch Effizienz und kurze Behandlungszeiten und darf auch nach dieser Untersuchung weiterhin als Goldstandard angesehen werden.
Aus klinischer Sicht muss kritisch festgestellt werden, dass die höhere Präzision der Robotik bislang nicht mit messbaren Vorteilen hinsichtlich der Heilung oder der Patientenzufriedenheit verbunden war. Des Weiteren ist die Fallzahl begrenzt und Langzeitergebnisse fehlen.
Fazit für die Praxis
Alle drei Verfahren ermöglichen eine klinisch zuverlässige Implantatpositionierung.
Die statische Bohrschablone bleibt ein effizienter, praxistauglicher Standard.
Die dynamische Navigation kann den Zugang im Seitenzahnbereich erleichtern, erfordert jedoch viel Erfahrung.
Robotergestützte Systeme erreichen die höchste Planungsgenauigkeit, sind derzeit aber zeit- und kostenintensiv.
Ein klarer klinischer Zusatznutzen der Robotik gegenüber den etablierten Verfahren ist bislang nicht belegt.
Die Studie: Shi JY, Wu XY, Lv XL, Liu M, Fu XJ, Liu BL, Lai HC, Tonetti MS: Comparison of implant precision with robots, navigation, or static guides. J Dent Res 2025;104(1):37–44. doi:10.1177/00220345241285566.

Univ.-Prof. Dr. Florian Beuer
Abteilung für zahnärztliche Prothetik, Alterszahnmedizin und Funktionslehre
Charité – Universitätsmedizin Berlin
Campus Benjamin Franklin
Aßmannshauser Str. 4-6, 14197 Berlin


{kind=link}